Linux epoll 模型(含LT 模式和 ET 模式详解)
综合 select 和 poll 的一些优缺点,Linux 从内核 2.6 版本开始引入了更高效的 epoll 模型,本节我们来详细介绍 epoll 模型。
要想使用 epoll 模型,必须先需要创建一个 epollfd,这需要使用 epoll_create 函数去创建:
#include <sys/epoll.h>
int epoll_create(int size);
参数 size 从 Linux 2.6.8 以后就不再使用,但是必须设置一个大于 0 的值。epoll_create 函数调用成功返回一个非负值的 epollfd,调用失败返回 -1。
有了 epollfd 之后,我们需要将我们需要检测事件的其他 fd 绑定到这个 epollfd 上,或者修改一个已经绑定上去的 fd 的事件类型,或者在不需要时将 fd 从 epollfd 上解绑,这都可以使用 epoll_ctl 函数:
int epoll_ctl(int epfd, int op, int fd, struct epoll_event* event);
参数说明:
参数 epfd 即上文提到的 epollfd;
参数 op,操作类型,取值有 EPOLL_CTL_ADD、EPOLL_CTL_MOD 和 EPOLL_CTL_DEL,分别表示向 epollfd 上添加、修改和移除一个其他 fd,当取值是 EPOLL_CTL_DEL,第四个参数 event 忽略不计,可以设置为 NULL;
参数 fd,即需要被操作的 fd;
参数 event,这是一个 epoll_event 结构体的地址,epoll_event 结构体定义如下:
struct epoll_event { uint32_t events; /* 需要检测的 fd 事件,取值与 poll 函数一样 */ epoll_data_t data; /* 用户自定义数据 */ };epoll_event 结构体的 data 字段的类型是 epoll_data_t,我们可以利用这个字段设置一个自己的自定义数据,它本质上是一个 Union 对象,在 64 位操作系统中其大小是 8 字节,其定义如下:
typedef union epoll_data { void* ptr; int fd; uint32_t u32; uint64_t u64; } epoll_data_t;函数返回值:epoll_ctl 调用成功返回 0,调用失败返回 -1,你可以通过 errno 错误码获取具体的错误原因。
创建了 epollfd,设置好某个 fd 上需要检测事件并将该 fd 绑定到 epollfd 上去后,我们就可以调用 epoll_wait 检测事件了,epoll_wait 函数签名如下:
int epoll_wait(int epfd, struct epoll_event* events, int maxevents, int timeout);
参数的形式和 poll 函数很类似,参数 events 是一个 epoll_event 结构数组的首地址,这是一个输出参数,函数调用成功后,events 中存放的是与就绪事件相关 epoll_event 结构体数组;参数 maxevents 是数组元素的个数;timeout 是超时时间,单位是毫秒,如果设置为 0,epoll_wait 会立即返回。
当 epoll_wait 调用成功会返回有事件的 fd 数目;如果返回 0 表示超时;调用失败返回 -1。
epoll_wait 使用示例如下:
while (true)
{
epoll_event epoll_events[1024];
int n = epoll_wait(epollfd, epoll_events, 1024, 1000);
if (n < 0)
{
//被信号中断
if (errno == EINTR)
continue;
//出错,退出
break;
}
else if (n == 0)
{
//超时,继续
continue;
}
for (size_t i = 0; i < n; ++i)
{
// 处理可读事件
if (epoll_events[i].events & POLLIN)
{
}
// 处理可写事件
else if (epoll_events[i].events & POLLOUT)
{
}
//处理出错事件
else if (epoll_events[i].events & POLLERR)
{
}
}
}
epoll_wait 与 poll 的区别
通过前面介绍 poll 与 epoll_wait 函数的介绍,我们可以发现:
epoll_wait 函数调用完之后,我们可以直接在 event 参数中拿到所有有事件就绪的 fd,直接处理即可(event 参数仅仅是个出参);而 poll 函数的事件集合调用前后数量都未改变,只不过调用前我们通过 pollfd 结构体的 events 字段设置待检测事件,调用后我们需要通过 pollfd 结构体的 revents 字段去检测就绪的事件( 参数 fds 既是入参也是出参)。
举个生活中的例子,某人不断给你一些苹果,这些苹果有生有熟,调用 epoll_wait 相当于:
1. 你把苹果挨个投入到 epoll 机器中(调用 epoll_ctl);
2. 调用 epoll_wait 加工,你直接通过另外一个袋子就能拿到所有熟苹果。
调用 poll 相当于:
1. 把收到的苹果装入一个袋子里面然后调用 poll 加工;
2. 调用结束后,拿到原来的袋子,袋子中还是原来那么多苹果,只不过熟苹果被贴上了标签纸,你还是需要挨个去查看标签纸挑选熟苹果。
当然,这并不意味着,poll 函数的效率不如 epoll_wait,一般在 fd 数量比较多,但某段时间内,就绪事件 fd 数量较少的情况下,epoll_wait 才会体现出它的优势,也就是说 socket 连接数量较大时而活跃连接较少时 epoll 模型更高效。
LT 模式和 ET 模式
与 poll 的事件宏相比,epoll 新增了一个事件宏 EPOLLET,这就是所谓的边缘触发模式(Edge Trigger,ET),而默认的模式我们称为 水平触发模式(Level Trigger,LT)。这两种模式的区别在于:
- 对于水平触发模式,一个事件只要有,就会一直触发;
- 对于边缘触发模式,只有一个事件从无到有才会触发。
这两个词汇来自电学术语,你可以将 fd 上有数据认为是高电平,没有数据认为是低电平,将 fd 可写认为是高电平,fd 不可写认为是低电平。那么水平模式的触发条件是状态处于高电平,而边缘模式是状态改为高电平,即:
水平模式的触发条件
1. 低电平 => 高电平
2. 高电平 => 高电平
边缘模式的触发条件
1. 低电平 => 高电平
说的有点抽象,以 socket 的读事件为例,对于水平模式,只要 socket 上有未读完的数据,就会一直产生 POLLIN 事件;而对于边缘模式,socket 上第一次有数据会触发一次,后续 socket 上存在数据也不会再触发,除非把数据读完后,再次产生数据才会继续触发。对于 socket 写事件,如果 socket 的 TCP 窗口一直不饱和,会一直触发 POLLOUT 事件;而对于边缘模式,只会触发一次,除非 TCP 窗口由不饱和变成饱和再一次变成不饱和,才会再次触发 POLLOUT 事件。
socket 可读事件水平模式触发条件:
1. socket上无数据 => socket上有数据
2. socket上有数据 => socket上有数据
socket 可读事件边缘模式触发条件:
1. socket上无数据 => socket上有数据
socket 可写事件水平模式触发条件:
1. socket可写 => socket可写
2. socket不可写 => socket可写
socket 可写事件边缘模式触发条件:
1. socket不可写 => socket可写
也就是说,如果对于一个非阻塞 socket,如果使用 epoll 边缘模式去检测数据是否可读,触发可读事件以后,一定要一次性把 socket 上的数据收取干净才行,也就是一定要循环调用 recv 函数直到 recv 出错,错误码是EWOULDBLOCK(EAGAIN 一样);如果使用水平模式,则不用,你可以根据业务一次性收取固定的字节数,或者收完为止。边缘模式下收取数据的代码示例如下:
bool TcpSession::RecvEtMode()
{
//每次只收取256个字节
char buff[256];
while (true)
{
int nRecv = ::recv(clientfd_, buff, 256, 0);
if (nRecv == -1)
{
if (errno == EWOULDBLOCK)
return true;
else if (errno == EINTR)
continue;
return false;
}
//对端关闭了socket
else if (nRecv == 0)
return false;
inputBuffer_.add(buff, (size_t)nRecv);
}
return true;
}
最后,我们来看一个 epoll 模型的完整例子:
/**
* 演示 epoll 通信模型,epoll_server.cpp
* zhangyl 2019.03.16
*/
#include <sys/types.h>
#include <sys/socket.h>
#include <arpa/inet.h>
#include <unistd.h>
#include <fcntl.h>
#include <sys/epoll.h>
#include <poll.h>
#include <iostream>
#include <string.h>
#include <vector>
#include <errno.h>
int main(int argc, char* argv[])
{
//创建一个侦听socket
int listenfd = socket(AF_INET, SOCK_STREAM, 0);
if (listenfd == -1)
{
std::cout << "create listen socket error." << std::endl;
return -1;
}
//将侦听socket设置为非阻塞的
int oldSocketFlag = fcntl(listenfd, F_GETFL, 0);
int newSocketFlag = oldSocketFlag | O_NONBLOCK;
if (fcntl(listenfd, F_SETFL, newSocketFlag) == -1)
{
close(listenfd);
std::cout << "set listenfd to nonblock error." << std::endl;
return -1;
}
//初始化服务器地址
struct sockaddr_in bindaddr;
bindaddr.sin_family = AF_INET;
bindaddr.sin_addr.s_addr = htonl(INADDR_ANY);
bindaddr.sin_port = htons(3000);
if (bind(listenfd, (struct sockaddr *)&bindaddr, sizeof(bindaddr)) == -1)
{
std::cout << "bind listen socket error." << std::endl;
close(listenfd);
return -1;
}
//启动侦听
if (listen(listenfd, SOMAXCONN) == -1)
{
std::cout << "listen error." << std::endl;
close(listenfd);
return -1;
}
//复用地址和端口号
int on = 1;
setsockopt(listenfd, SOL_SOCKET, SO_REUSEADDR, (char *)&on, sizeof(on));
setsockopt(listenfd, SOL_SOCKET, SO_REUSEPORT, (char *)&on, sizeof(on));
//创建epollfd
int epollfd = epoll_create(1);
if (epollfd == -1)
{
std::cout << "create epollfd error." << std::endl;
close(listenfd);
return -1;
}
epoll_event listen_fd_event;
listen_fd_event.events = POLLIN;
listen_fd_event.data.fd = listenfd;
//将侦听socket绑定到epollfd上去
if(epoll_ctl(epollfd, EPOLL_CTL_ADD, listenfd, &listen_fd_event) == -1)
{
std::cout << "epoll_ctl error." << std::endl;
close(listenfd);
return -1;
}
int n;
while (true)
{
epoll_event epoll_events[1024];
n = epoll_wait(epollfd, epoll_events, 1024, 1000);
if (n < 0)
{
//被信号中断
if (errno == EINTR)
continue;
//出错,退出
break;
}
else if (n == 0)
{
//超时,继续
continue;
}
for (size_t i = 0; i < n; ++i)
{
// 事件可读
if (epoll_events[i].events & POLLIN)
{
if (epoll_events[i].data.fd == listenfd)
{
//侦听socket,接受新连接
struct sockaddr_in clientaddr;
socklen_t clientaddrlen = sizeof(clientaddr);
//接受客户端连接, 并加入到fds集合中
int clientfd = accept(listenfd, (struct sockaddr *)&clientaddr, &clientaddrlen);
if (clientfd != -1)
{
//将客户端socket设置为非阻塞的
int oldSocketFlag = fcntl(clientfd, F_GETFL, 0);
int newSocketFlag = oldSocketFlag | O_NONBLOCK;
if (fcntl(clientfd, F_SETFL, newSocketFlag) == -1)
{
close(clientfd);
std::cout << "set clientfd to nonblock error." << std::endl;
}
else
{
epoll_event client_fd_event;
client_fd_event.events = POLLIN;
client_fd_event.data.fd = clientfd;
if(epoll_ctl(epollfd, EPOLL_CTL_ADD, clientfd, &client_fd_event) != -1)
{
std::cout << "new client accepted, clientfd: " << clientfd << std::endl;
}
else
{
std::cout << "add client fd to epollfd error." << std::endl;
close(clientfd);
}
}
}
}
else
{
//普通clientfd,收取数据
char buf[64] = { 0 };
int m = recv(epoll_events[i].data.fd, buf, 64, 0);
if (m == 0)
{
//对端关闭了连接,从epollfd上移除clientfd
if(epoll_ctl(epollfd, EPOLL_CTL_DEL, epoll_events[i].data.fd, NULL) != -1)
{
std::cout << "client disconnected, clientfd: " << epoll_events[i].data.fd << std::endl;
}
close(epoll_events[i].data.fd);
}
else if (m < 0)
{
//出错,从epollfd上移除clientfd
if (errno != EWOULDBLOCK && errno != EINTR)
{
if(epoll_ctl(epollfd, EPOLL_CTL_DEL, epoll_events[i].data.fd, NULL) != -1)
{
std::cout << "client disconnected, clientfd: " << epoll_events[i].data.fd << std::endl;
}
close(epoll_events[i].data.fd);
}
}
else
{
//正常收到数据
std::cout << "recv from client: " << buf << ", clientfd: " << epoll_events[i].data.fd << std::endl;
}
}
}
else if (epoll_events[i].events & POLLERR)
{
//TODO: 暂且不处理
}
}// end outer-for-loop
}// end while-loop
//关闭侦听socket
//(理论上应该关闭包括所有clientfd在内的fd,但这里只是为了演示问题,就不写额外的代码来处理啦)
close(listenfd);
return 0;
}
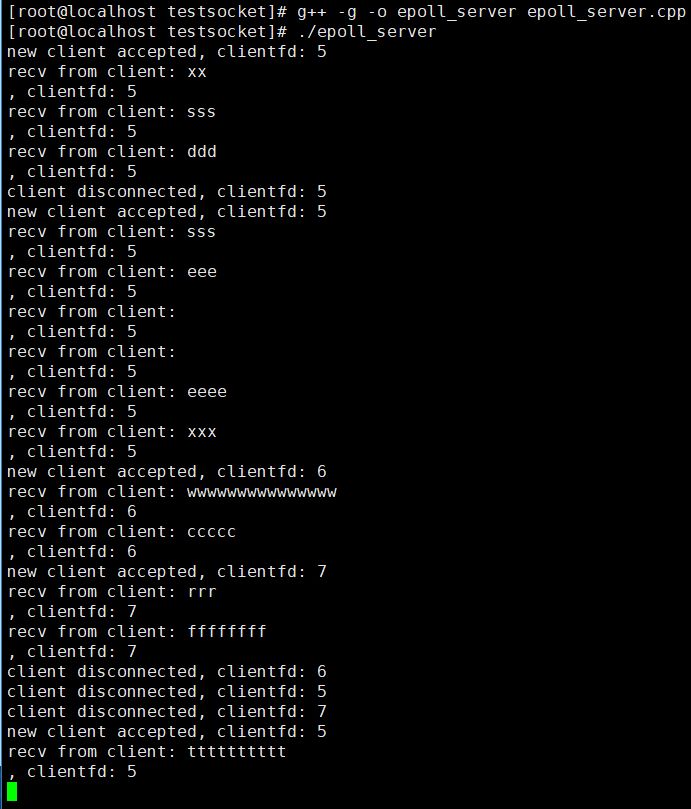
编译上述程序生成 epoll_server 并启动,然后使用 nc 命令启动三个客户端给服务器发数据效果如下图所示: